Uma equipe de pesquisa da Universidade de West Virginia, nos Estados Unidos, desenvolveu recentemente uma mão robótica macia, mas poderosa, que pode não apenas colher delicadamente frutas e vegetais frágeis, como morangos, mas também avaliar de forma abrangente a maturação por meio do toque e da visão durante o processo de colheita, o que deverá reduzir significativamente os custos de mão de obra e as taxas de desperdício no processo de colheita.
Segundo relatos, a agricultura está se tornando uma das indústrias cada vez mais afetadas pela tecnologia robótica. Os agricultores de muitas regiões do mundo enfrentam a dupla pressão da escassez de mão-de-obra e do aumento dos custos laborais. Em algumas culturas, os custos da colheita manual chegam a chegar perto de metade dos custos totais de produção. Para frutas e vegetais com janelas de colheita extremamente curtas e fáceis de serem machucadas, como morangos, framboesas e abacates, muitas vezes é difícil equilibrar eficiência e perda com a colheita manual tradicional ou mecânica rígida. Como resultado, os agricultores podem perder até um quarto do seu rendimento.
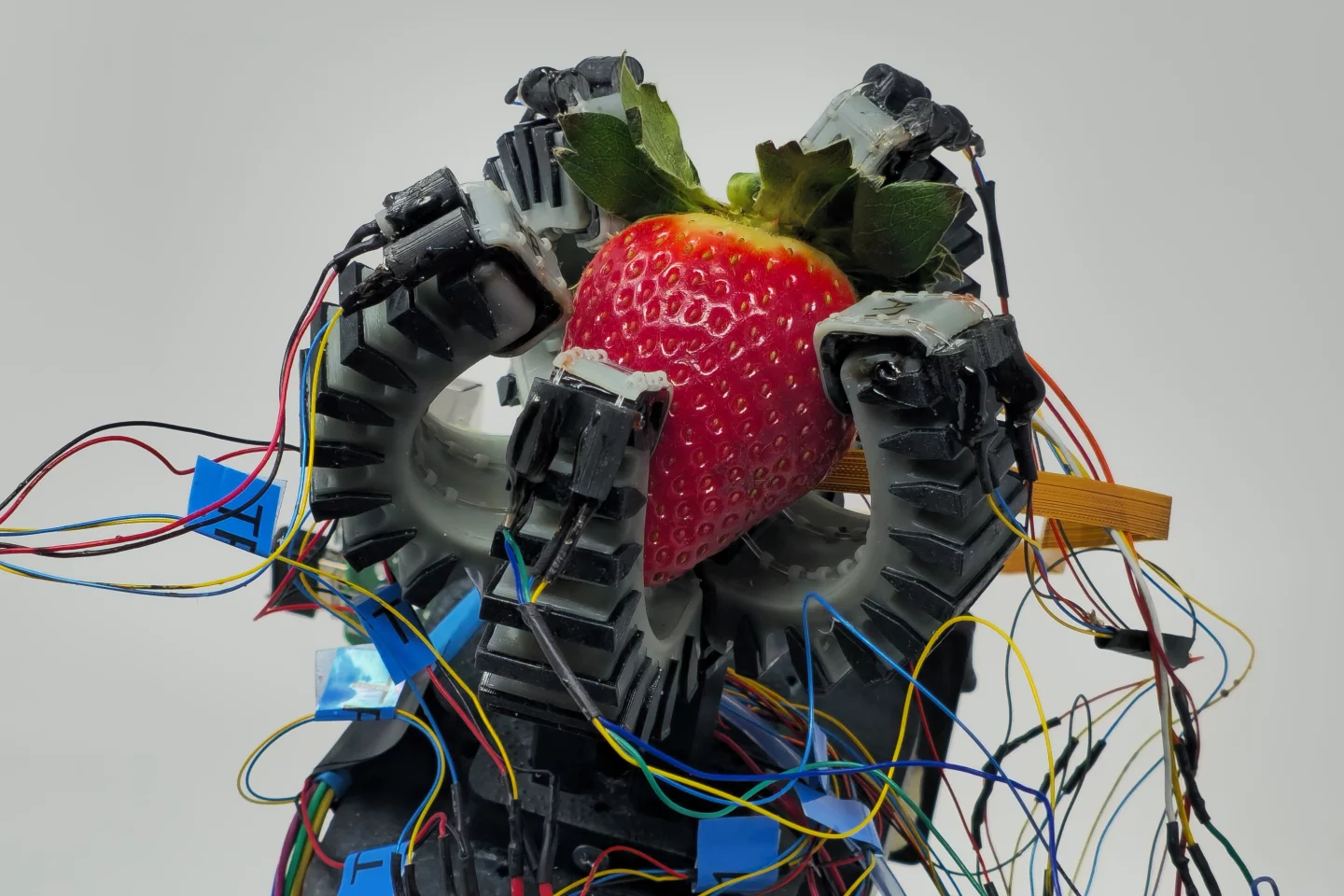
A equipe do “Robiotics Lab” da West Virginia University tem trabalhado no desenvolvimento de robôs que imitam o movimento dos animais. A mão macia do robô lançada desta vez não é a “garra mecânica” de metal que as pessoas pensam. Em vez disso, inspira-se na anatomia da estrela do mar e utiliza materiais de silicone e poliuretano para fazer dedos macios. Ao mesmo tempo, a forma geral ainda mantém uma disposição de cinco dedos semelhante à de uma mão humana, para que possa pegar e segurar as frutas com mais naturalidade.
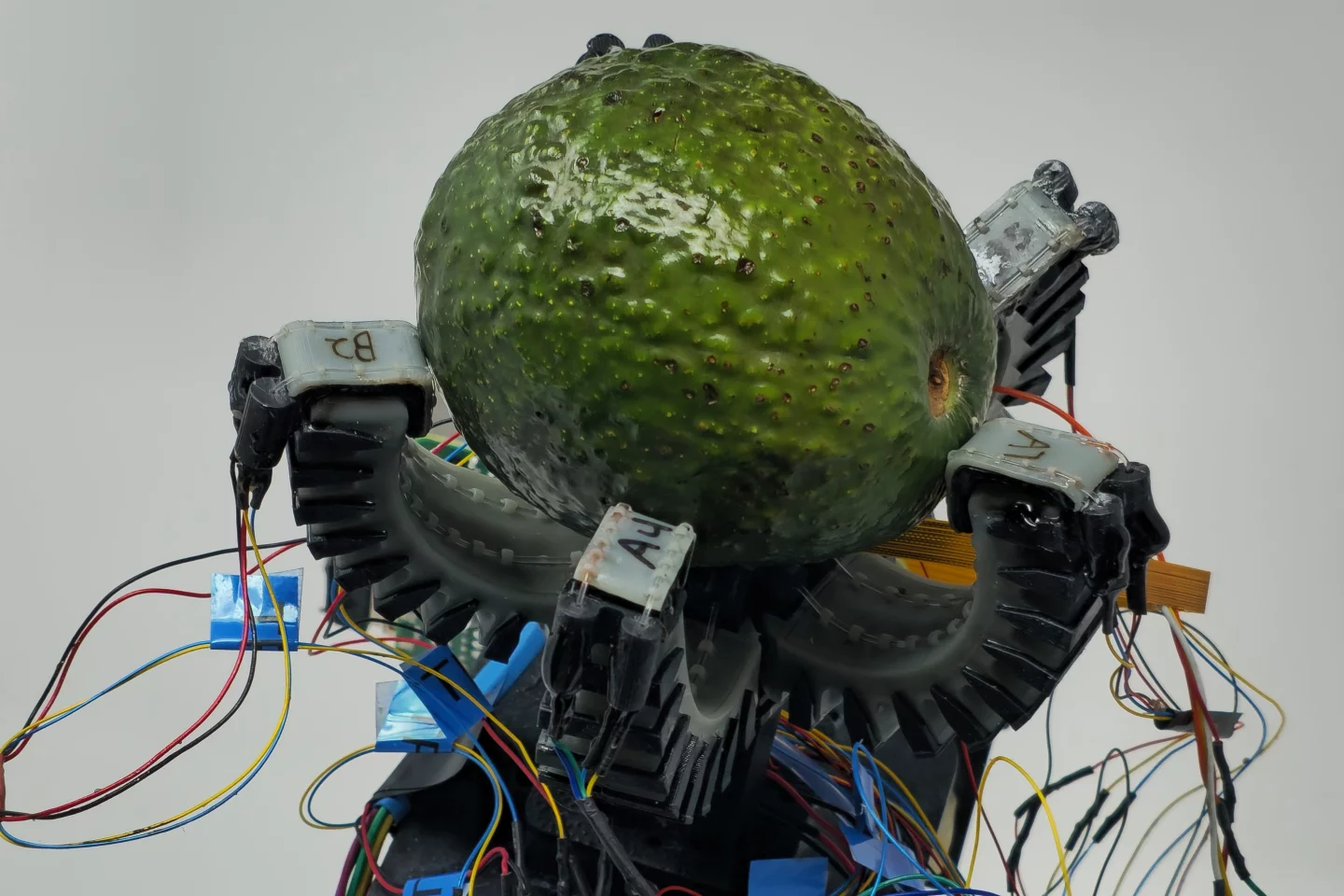
Em termos de capacidade de percepção, esta nova mão robótica está equipada com uma câmera em miniatura para julgamento visual da aparência das frutas. Esta função foi aplicada a alguns robôs agrícolas. No entanto, os investigadores salientaram que confiar apenas na aparência não é suficiente para avaliar com precisão a maturação. Tomando os abacates como exemplo, a sua maturação muitas vezes precisa ser detectada através de beliscões suaves. Como deixar o robô aprender esse julgamento “humano intuitivo” é uma das principais dificuldades desta pesquisa.
Para resolver este problema, a equipe de pesquisa incorporou sensores táteis especiais dentro dos dedos macios, para que quando o robô aperta suavemente a fruta, ele possa obter informações físicas sobre a dureza e elasticidade sem esmagar a fruta. Esses sensores também podem monitorar a força de retenção em tempo real. Quando o sistema determina que a aderência atual não é firme o suficiente, o robô ajustará automaticamente a força para evitar que a fruta escorregue ou caia no chão.
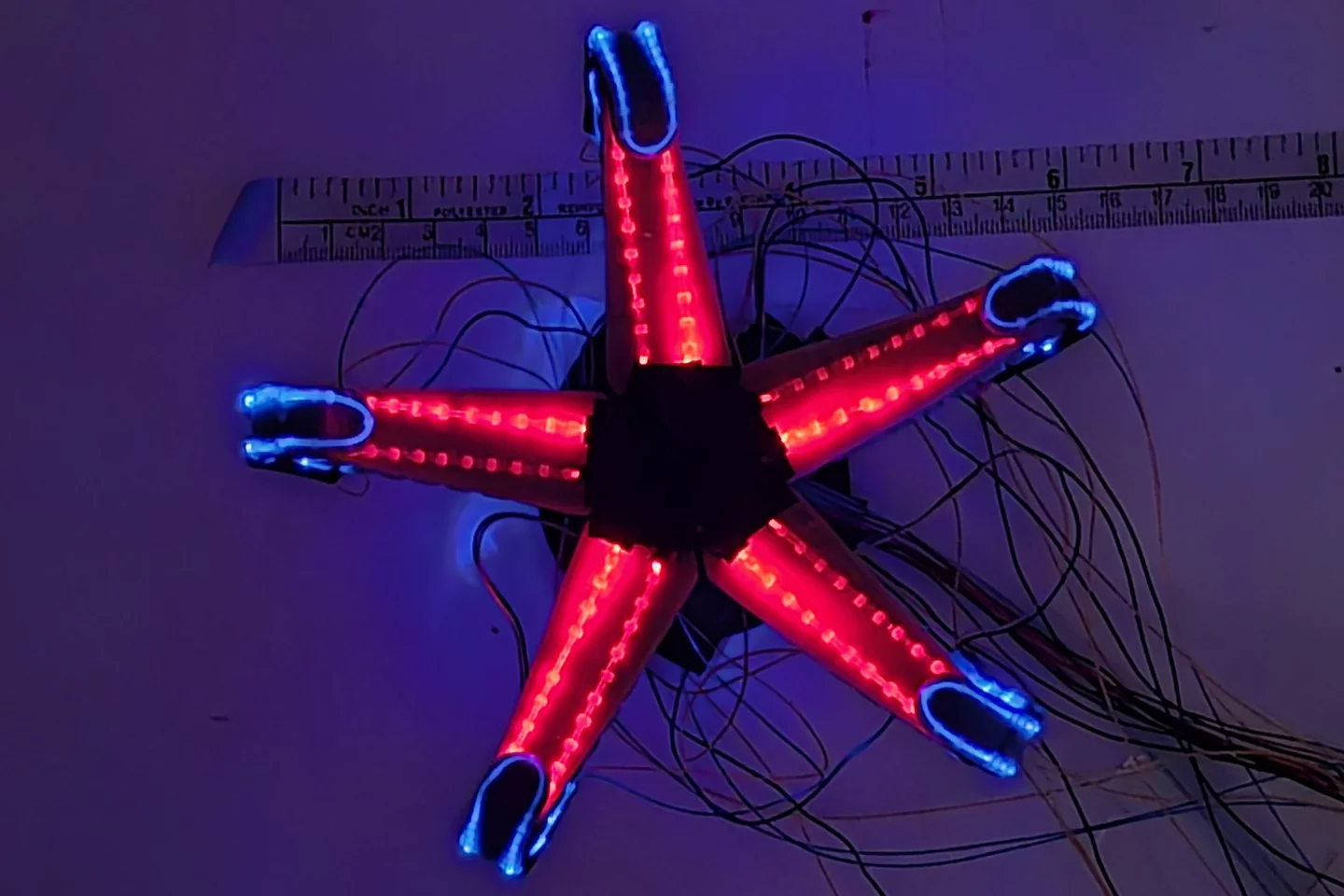
Durante a fase de testes, a mão do robô demonstrou alta percepção e precisão de controle, e o sensor conseguiu prever o formato da fruta agarrada com quase 100% de precisão. O protótipo atual pesa menos de 65 gramas, leva menos de dois segundos para abrir e fechar uma vez e pode levantar um objeto máximo de cerca de 1 quilograma, fornecendo as condições básicas para leveza e velocidade de resposta para a integração real de máquinas agrícolas.
O líder do projeto, Anand Mishra, professor assistente do Departamento de Engenharia Mecânica, de Materiais e Aeroespacial, disse que a equipe planeja trazer esta tecnologia de apreensão de software para o mercado global nos próximos dois a quatro anos e está trabalhando no desenvolvimento de uma apreensão mais escalável dispositivo para atender às necessidades de implantação em larga escala no campo. Os investigadores também estão optimistas quanto às perspectivas de aplicação desta tecnologia numa gama mais ampla de cenários, incluindo a captura de objectos estranhos em missões espaciais, a exploração do ambiente subaquático e a operação segura de tecidos e órgãos frágeis no campo dos cuidados médicos.

Artigos de pesquisa relevantes foram publicados na revista "Nature Communications", mostrando que soluções de captura de robôs que combinam estruturas de software, detecção de fibra óptica e sistemas de visão estão se tornando um caminho técnico importante para cenários de alta perda e alta precisão. Os investigadores salientaram que, à medida que esses robôs leves avançam gradualmente para a comercialização, espera-se que a proporção entre a pressão humana e os resíduos de frutas e vegetais na linha de frente da colheita agrícola seja significativamente melhorada, fornecendo uma nova base de ferramentas para o desenvolvimento da agricultura de precisão e de maquinaria agrícola inteligente.