Já há algum tempo ouvimos falar de dispositivos “bisestáveis”, que podem manter dois estados sem consumir energia. Um dispositivo biestável é um dispositivo tensionador capaz de alternar entre dois estados estáveis, mas não requer eletricidade para permanecer em nenhum dos estados. Um novo dispositivo inspirado em vagens de sementes de plantas assume a forma de uma pinça robótica que é resistente e fácil de ativar.
Grampos de metal são bons exemplos de objetos do cotidiano que podem agarrar objetos por meio do contato. Para esses itens, normalmente não queremos aplicar muita pressão para acionar a ação de agarrar - isso significa querer que o agarrador tenha uma "barreira de energia" baixa.
O problema é que dispositivos biestáveis com barreiras de baixa energia muitas vezes não têm energia suficiente para agarrar os objetos que agarram. Em outras palavras, é provável que percam o controle de objetos pesados ou de objetos puxados por forças externas.
O que precisamos é de um agarrador que tenha uma barreira de baixa energia ao agarrar inicialmente um objeto, mas que tenha uma barreira de energia aumentada quando o objeto for agarrado. Quando chega a hora de liberar o objeto, a barreira de energia é abaixada novamente.
Com esse requisito em mente, uma equipe de cientistas chineses estudou as vagens de sementes biestáveis de impatiens.

Enquanto as sementes da vagem forem imaturas e incapazes de se dispersar, a vagem mantém uma alta barreira energética, dificultando o seu desencadeamento. No entanto, uma vez que as sementes amadurecem, esta barreira energética enfraquece. Portanto, mesmo a pressão das gotas de chuva é suficiente para que as vagens lancem as sementes no solo circundante.
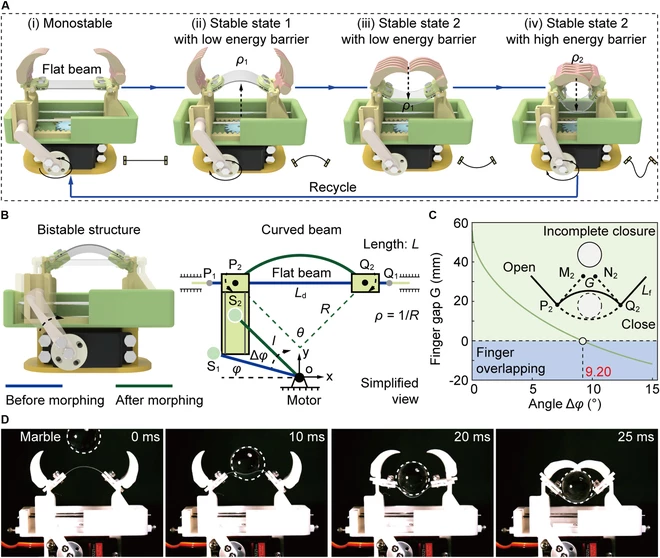
Diagrama esquemático da pinça biônica biestável
Dr. Yang Jinzhao da Universidade Sun Yat-sen na China, Dr. Wu Jianing da Universidade Sun Yat-sen e Dr.
A pinça, inspirada nas cápsulas impatiens, consiste em dois "dedos" de preensão cujas bases estão conectadas a cada extremidade de uma viga elástica. Os dois grampos que conectam os dedos à viga são conectados, cada um, a um eixo giratório acionado por um motor.
No estado neutro padrão do suporte, a viga é plana e livre de tensão. No entanto, quando um objeto precisa ser agarrado, a haste gira, fazendo com que o feixe se dobre ligeiramente para cima. Isto o coloca em um estado biestável sob tensão com uma barreira de baixa energia.
Assim, quando a pinça é colocada em torno de um objeto - e esse objeto pressiona contra uma viga curvada para cima - ela faz com que a viga salte em uma direção curvada para baixo, enquanto simultaneamente puxa o dedo em direção ao objeto.
Quando isso acontece, o eixo gira na direção oposta, fazendo com que a viga se dobre ainda mais para baixo. Isto aumenta a sua barreira energética, o que fortalece e assegura a aderência da pinça ao item.
Numa demonstração da tecnologia, uma das garras foi montada em cima de um drone quadricóptero, permitindo que o drone ficasse pendurado em galhos de árvores, grades e outros objetos sem ficar pairando no lugar. Embora o motor do feixe consuma alguma energia ao ajustar a tensão do feixe, nenhuma energia é necessária para manter o controle do objeto. Isso não acontece com as pinças tradicionais.

Drones usados em pesquisas
“Nossa garra robótica tem velocidade de resposta rápida, força de interação programável e design simples e eficiente, abrindo novos caminhos para sistemas robóticos de próxima geração”, disse o Dr. Jianing Wu, da Universidade Sun Yat-sen. Wu co-liderou o projeto com o Dr. Peng Haijun da Universidade de Tecnologia de Dalian. "Este mecanismo único pode expandir significativamente as capacidades do robô, permitindo que ele seja usado em diversos campos."
Um artigo sobre a pesquisa foi publicado recentemente na revista Research.