Uma equipe da Universidade Rice, nos Estados Unidos, lançou recentemente um novo sistema de radar rodoviário chamado EyeDAR, que deverá fornecer aos veículos autônomos capacidades de detecção expandidas semelhantes a um “terceiro olho”. Os investigadores disseram que esta tecnologia pode melhorar significativamente a precisão da percepção ambiental e a redundância de segurança dos veículos autónomos, transmitindo informações importantes de tráfego de volta ao sistema montado no veículo através de dispositivos de radar de ondas milimétricas implantados na infra-estrutura rodoviária.
A condução autônoma existente depende principalmente de câmeras de bordo, lidar (LiDAR) e radar tradicional para trabalharem juntos: a câmera é responsável por identificar pedestres, veículos e sinais de trânsito, e o LiDAR usa pulsos de laser para construir uma nuvem de pontos tridimensionais de alta precisão para compensar as deficiências de visão e radar na percepção de profundidade espacial. No entanto, ambos são suscetíveis a condições climáticas severas, como chuva, neve, neblina, etc. O radar alcança a detecção de alvos que não depende da luz e do clima, transmitindo e recebendo ondas de rádio. No entanto, no ambiente rodoviário real, os objetos detectados muitas vezes refletem apenas uma pequena quantidade de sinais, e um grande número de ondas de radar são espalhadas, resultando em informações incompletas recebidas pelo radar do veículo, dificultando a identificação oportuna de riscos potenciais, como pedestres e veículos bloqueados ou parcialmente bloqueados.
À medida que os camiões autónomos, os robôs de entrega, etc. avançam gradualmente para a comercialização, a limitação dos sensores em "não conseguir ver claramente ou longe" em condições de estrada complexas é cada vez mais considerada como uma deficiência de segurança. A equipe da Rice University está tentando estender o sistema de percepção dos veículos para a infraestrutura rodoviária, usando o EyeDAR para preencher pontos cegos e lacunas de informação. Este dispositivo adota um design de radar de ondas milimétricas de baixa potência e pode ser instalado em instalações à beira da estrada, como semáforos, sinais de trânsito e outdoors. Ele “coleta” as ondas refletidas originalmente espalhadas no ambiente, transforma-as em uma descrição mais completa dos participantes do trânsito ao redor e as transmite de volta ao sistema de radar de bordo do veículo.
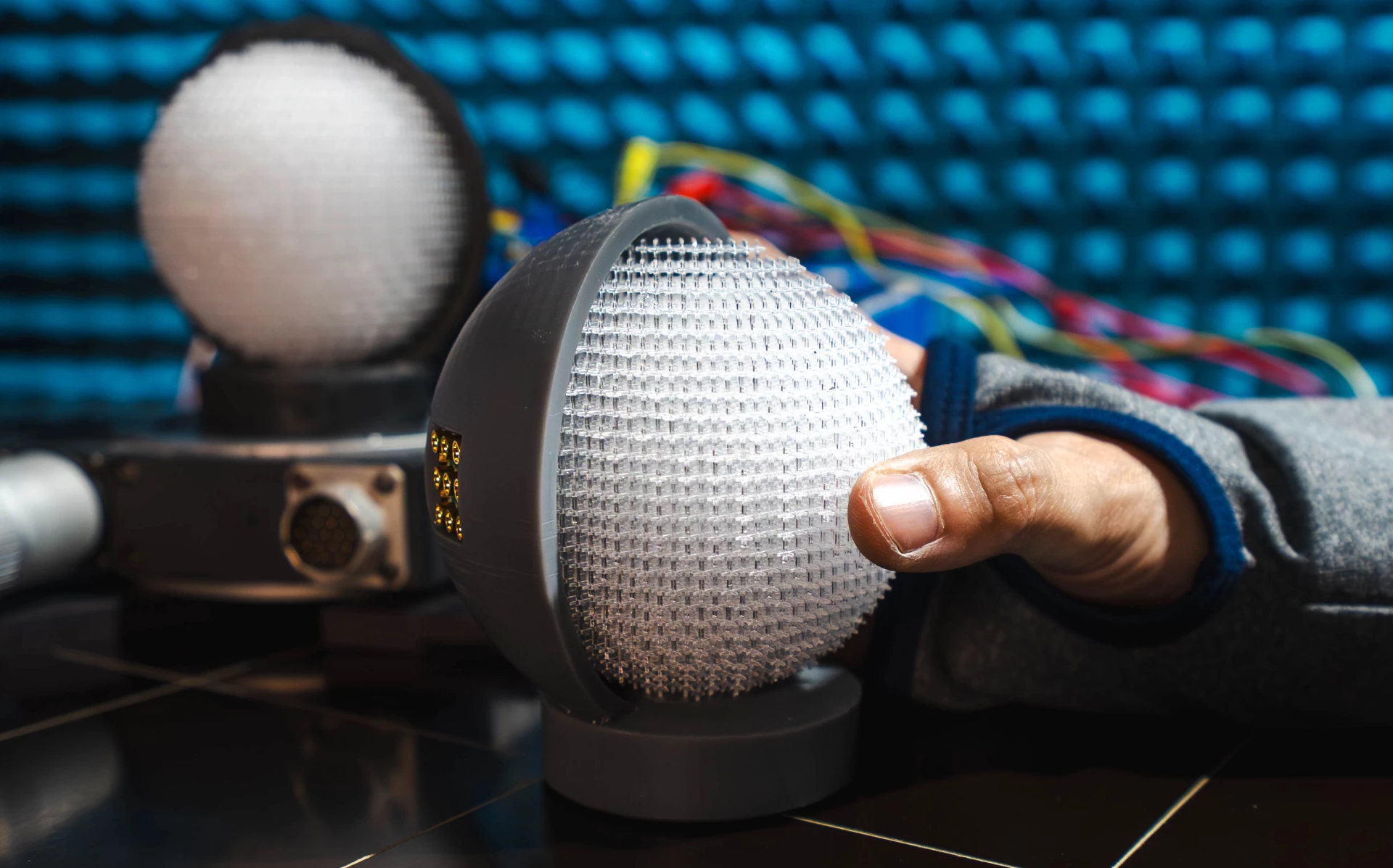
O núcleo do EyeDAR é uma unidade de detecção do tamanho de uma laranja, composta por duas partes semelhantes a uma "lente" e uma "retina": a extremidade frontal é uma lente de metamaterial Luneburg feita com tecnologia de impressão 3D, que é usada para focar com precisão sinais de rádio de diferentes direções para um foco fixo; seguido por uma fileira de conjuntos de antenas dispostos de perto, responsáveis por receber e analisar as informações espaciais desses sinais focados e, em seguida, realimentá-las ao sistema de radar automotivo. Ao contrário das soluções de radar tradicionais que exigem conjuntos de antenas em grande escala e cálculos digitais complexos para completar a formação de feixe e o processamento de sinal, o EyeDAR depende da estrutura física da própria lente para completar uma grande quantidade de trabalho de "pré-processamento", simplificando enormemente a carga sobre hardware eletrônico e algoritmos.
Segundo a equipe de pesquisa, essa lente é composta por mais de 8.000 minúsculas unidades com diferentes formatos e índices de refração. A posição e os parâmetros de cada unidade são cuidadosamente projetados para que todo o material possa dobrar e focar de uma maneira específica quando as ondas eletromagnéticas passam. É essencialmente um processador de sinal analógico "hardware-hardware". Através desta estrutura de metamaterial, o EyeDAR pode completar "instantaneamente" o pré-cálculo da informação espacial durante o processo de transmissão na velocidade da luz, eliminando a necessidade de uma grande quantidade de processamento digital demorado e consumidor de energia no radar tradicional. Os resultados experimentais mostram que o sistema pode determinar as direções dos alvos mais de 200 vezes mais rápido do que o radar tradicional, o que é considerado um salto significativo de desempenho no processamento analógico em comparação com o processamento digital.

Ao contrário do radar rodoviário convencional ou do equipamento de transmissão ativo, o EyeDAR em si não gera novas ondas eletromagnéticas. Em vez disso, ele se concentra na coleta de ecos “residuais” espalhados depois que o veículo detecta o alvo, depois os filtra e reconstrói e reflete o sinal “limpo” de volta ao radar montado no veículo. Os pesquisadores acreditam que este projeto, que é compacto, de baixo custo, tem uma arquitetura simples e depende de processamento de simulação ultrarrápido, deverá suportar a colocação em larga escala ao longo de estradas e rodovias urbanas, formando assim uma rede de infraestrutura que serve a "visão de longe" e a "perspectiva" dos veículos autônomos.
No entanto, a especialista em produção Emeka Moronu permanece cautelosa sobre se o plano pode realmente ser implementado. Ele ressaltou que, embora os modelos teóricos e os dados experimentais sejam emocionantes, é uma tarefa de engenharia muito desafiadora replicar milhares de unidades microestruturais de forma estável por um longo tempo na produção real e garantir que elas mantenham a precisão geométrica e o desempenho em ambientes externos extremos, como exposição a altas temperaturas e frio e congelamento intensos. Isto também pode se tornar um dos maiores limites para o EyeDAR sair do laboratório e avançar para uma implantação em larga escala.
Apesar da incerteza em torno das perspectivas, a equipe da Rice University acredita que o EyeDAR demonstra o potencial do radar de metamateriais na estrada para a segurança na direção autônoma. Uma vez implantados em larga escala, os veículos podem contar com esses “olhos na beira da estrada” para obter informações sobre as condições da estrada além do alcance de detecção de seus próprios sensores e detectar precocemente participantes do trânsito nas esquinas e pedestres ou veículos obscurecidos por grandes obstruções, melhorando assim a redundância de segurança do sistema de transporte geral. Os investigadores também prevêem que esta tecnologia também pode ser expandida para cenários de aplicação como drones, robôs e monitorização de segurança no futuro, fornecendo um suporte de percepção ambiental mais fiável para uma variedade de sistemas autónomos.