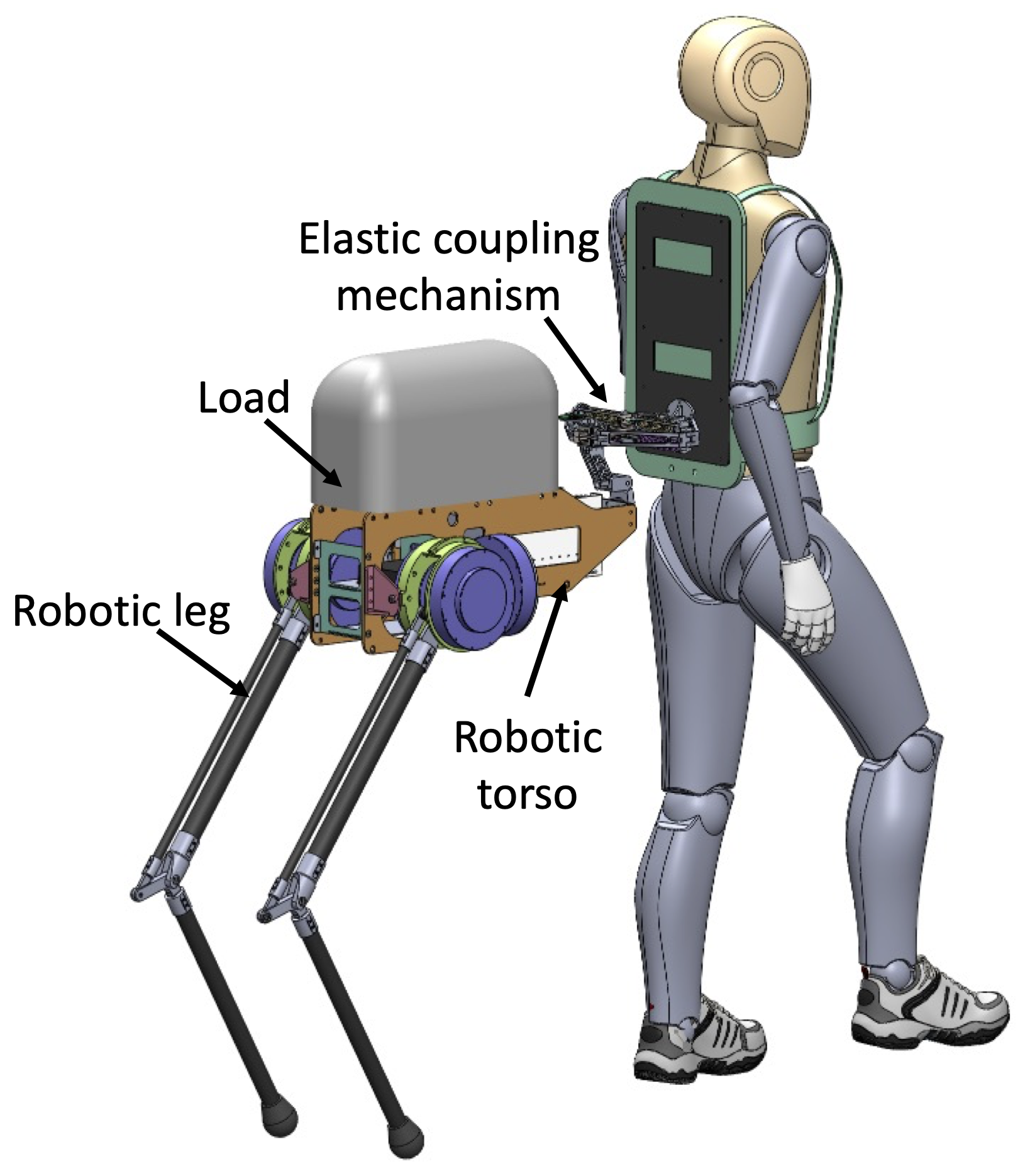
A equipe do professor Fu Chenglong, da Southern University of Science and Technology, desenvolveu originalmente um robô ambulante centauro que suporta peso. Os resultados relevantes foram publicados em revistas conceituadas na área de robótica. Os robôs exoesqueletos tradicionais têm baixa eficiência de assistência e só podem reduzir a taxa metabólica humana em cerca de 10%.O robô centauro quebra o design tradicional e se inspira na forma resistente dos quadrúpedes. Como membros independentes, ele é conectado às costas humanas por meio de uma interface de acoplamento elástico vestível para construir um sistema quadrúpede híbrido homem-máquina.
O robô está equipado com um mecanismo de acoplamento elástico amolecido, que possui características de rigidez não linear e realiza o desacoplamento dinâmico de assistência de potência e equilíbrio; combinado com a estrutura de controle colaborativo de interação ambulante,Ele pode detectar a intenção de movimento do corpo humano em tempo real, segui-lo em todas as direções com alta precisão sem instruções manuais e produzir impulso horizontal estável ao mesmo tempo.
A verificação experimental mostra que o robô apresenta excelente desempenho. Em termos de manobrabilidade, ele pode completar o círculo da figura “8” ao redor da pilha em um espaço estreito de 1 metro e passar suavemente por superfícies de estradas complexas, como degraus e encostas.
Em termos de desempenho de suporte de peso,Ao carregar um peso de 20kg, o custo metabólico líquido do corpo humano é reduzido em 35% e a pressão nas solas dos pés é reduzida em 52%., não há diferença significativa entre estabilidade e caminhada com carga zero.
Este robô é adequado para resgate de emergência, exploração de campo, suporte logístico de terrenos complexos e outros cenários, e espera-se que ultrapasse os limites fisiológicos do corpo humano no futuro.