Pesquisadores da Universidade de Harvard desenvolveram recentemente um novo conjunto de tecnologia de impressão 3D que pode imprimir diretamente fibras musculares biônicas com “capacidades de movimento programadas”, dando um passo fundamental para que os robôs alcancem movimentos flexíveis mais próximos dos humanos. A indústria acredita que esta conquista deverá mudar a forma como os robôs leves, os dispositivos médicos e as estruturas inteligentes são projetados.
A comunidade de engenharia há muito cria estruturas semelhantes a ossos, nervos e sistemas sensoriais para robôs, mas os músculos sempre foram os mais difíceis de simular. Os robôs tradicionais dependem principalmente de motores e acionamentos de sistemas hidráulicos e pneumáticos. Embora seus movimentos sejam precisos e poderosos, eles geralmente apresentam estruturas rígidas, mecanismos complexos e posturas deselegantes. É difícil conseguir movimentos suaves, suaves e controlados com precisão, semelhantes aos do corpo humano. Anteriormente, os pesquisadores tentaram usar músculos artificiais pneumáticos, ligas sensíveis ao calor, polímeros eletricamente responsivos, materiais magnéticos e sistemas de cabos que imitam tendões humanos para obter acionamento de software. No entanto, muitas vezes exigem compressores externos volumosos, dispositivos de alta tensão ou mecanismos complexos, dificultando a obtenção simultânea de leveza, capacidade de resposta e fabricação complexa.
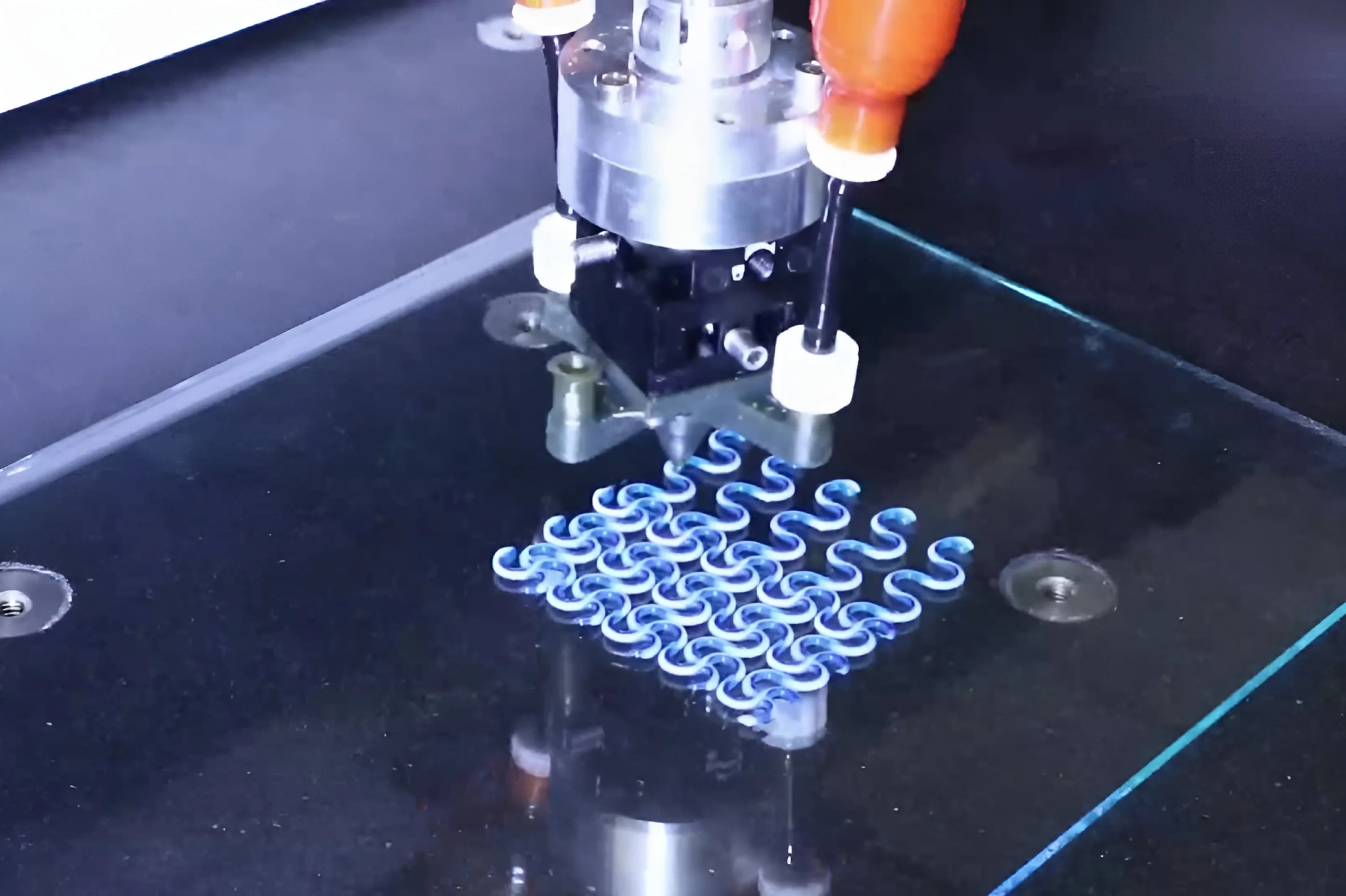
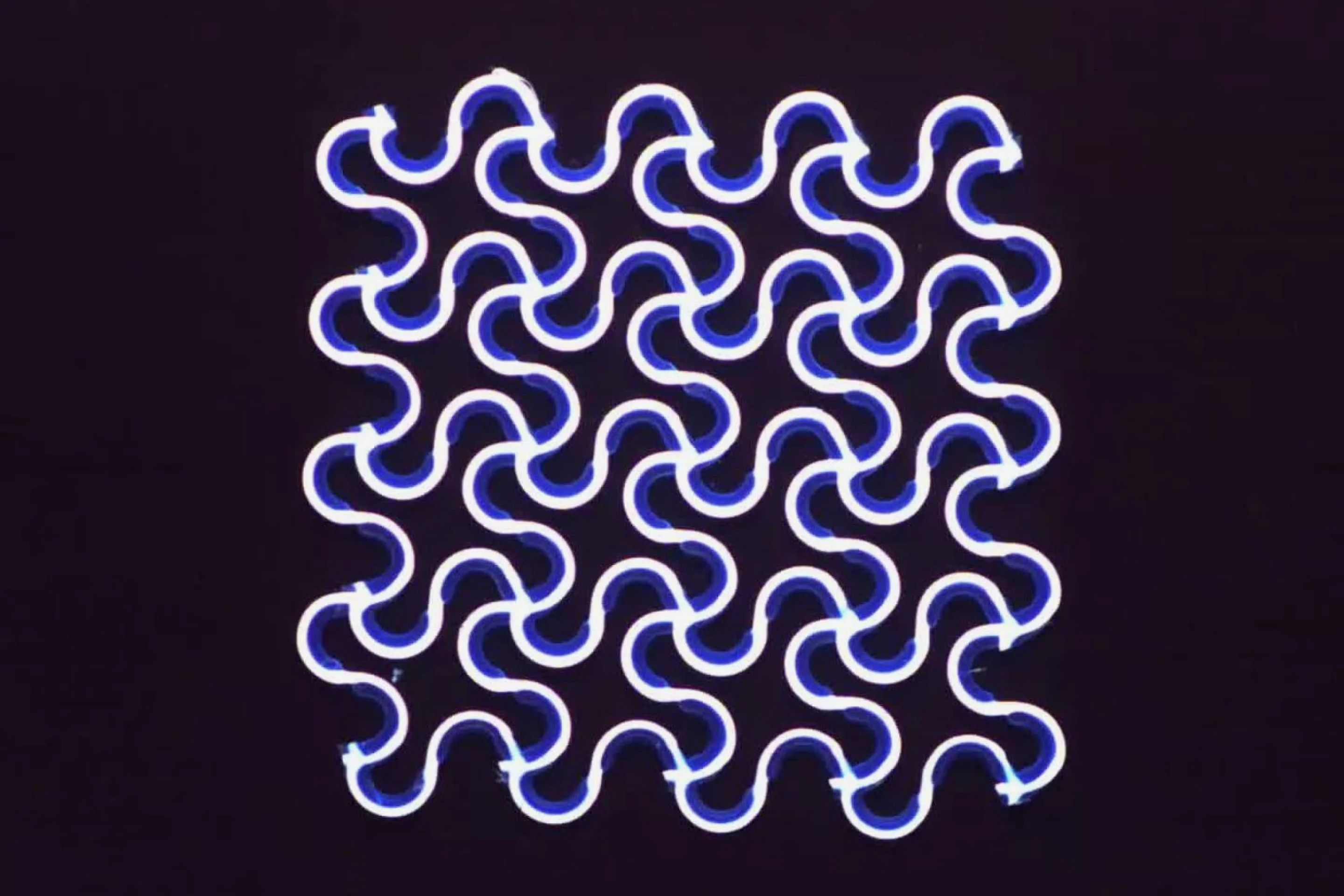
O novo método proposto pela equipe da Escola de Engenharia e Ciências Aplicadas de Harvard John A. Paulson tenta "construir" a lógica do movimento a partir do nível do material. Os pesquisadores usaram a tecnologia de impressão 3D para imprimir com precisão dois tipos de materiais macios lado a lado em finas fibras "musculares" biônicas: um é um elastômero de cristal líquido "material ativo" que muda de forma quando exposto ao calor, e o outro é um material de "elastômero passivo" que resiste à deformação. Ao girar o bico durante o processo de impressão, a equipe escreveu padrões helicoidais de orientação molecular em escala microscópica, controlando assim com precisão o comportamento da resposta em diferentes áreas.
Sob condições de aquecimento, o elastômero de cristal líquido "ativo" encolhe ao longo de uma direção específica do arranjo molecular, enquanto o material "passivo" intimamente conectado a ele forma uma resistência a esse encolhimento. Como resultado, toda a fibra sofrerá deformações complexas, como flexão, torção, ondulação e até enrolamento. Ao alterar a disposição dos dois materiais e os parâmetros de rotação do bocal, os pesquisadores podem predefinir diferentes trajetórias de deformação dentro de uma única fibra, permitindo que ela se estique, encolha, enrole em espiral ou se desdobre de uma forma predeterminada quando aquecida, sem a necessidade de engrenagens adicionais, juntas rígidas ou mecanismos pós-montagem.
Na demonstração experimental, a equipe imprimiu uma variedade de estruturas de rede macia e fibras onduladas e observou seus métodos únicos de deformação por aquecimento. Algumas estruturas expandem significativamente em volume após o aquecimento, enquanto outras encolhem como um todo; a treliça plana pode inchar em uma superfície curva em forma de cúpula após ser aquecida, mostrando capacidades significativas de deformação tridimensional. Os pesquisadores também usaram esse tipo de material para criar uma pinça macia que pode cair e enrolar ao se aproximar de um objeto, depois apertar para completar a preensão e, em seguida, afrouxar e soltar devido às mudanças de temperatura, alcançando um processo de preensão flexível semelhante ao de uma mão humana.
De acordo com a equipe de pesquisa, espera-se que esta tecnologia seja usada em áreas como manipuladores suaves adaptativos, estruturas ativas de filtragem e regulação, dispositivos biomédicos, componentes sensíveis à temperatura e sistemas robóticos deformáveis no futuro. Comparado com os métodos de acionamento tradicionais, este método é altamente compatível com o processo de impressão 3D e conduz à fabricação de estruturas internas complexas e altamente personalizadas, possibilitando combinações geométricas e de movimento que antes eram difíceis de conseguir com atuadores convencionais.
No entanto, o sistema atual ainda apresenta limitações significativas. Atualmente, a ativação da fibra depende principalmente da estimulação térmica, o que torna difícil combinar sistemas motores maduros em termos de velocidade de resposta e eficiência energética, e a capacidade geral de saída não é suficiente para substituir completamente os atuadores robóticos tradicionais em cenários de alta potência. Os pesquisadores disseram que os materiais e projetos estruturais relevantes ainda estão em fase experimental e precisam ser continuamente otimizados em termos de métodos de estimulação, durabilidade, eficiência de utilização de energia, etc., antes que possam realmente avançar para aplicações comerciais e de engenharia.
Esta pesquisa foi conduzida por uma equipe da Universidade de Harvard, e resultados detalhados foram divulgados pela Escola de Engenharia e Ciências Aplicadas da escola.